介电弹性体(Dielectric Elastomer, DE)作为一种智能柔性材料,凭借其高能量密度、快速响应和大形变特性,在仿生机器人、生物医疗和传感器等领域展现出广阔的应用前景。其性能测试与驱动控制的核心挑战在于高电压驱动与微弱信号检测,而高压放大器正是解决这些问题的关键设备。
一、介电弹性体测试需求与高压放大器的核心功能
介电弹性体的驱动原理基于电场诱导的麦克斯韦应力效应,其形变量与施加电压的平方成正比。为实现有效驱动,通常需加载数百至数千伏的高压电场,同时需精准控制波形、频率和幅值。测试过程中还需捕捉微安级电流或微米级形变信号,这对测试设备提出了以下要求:
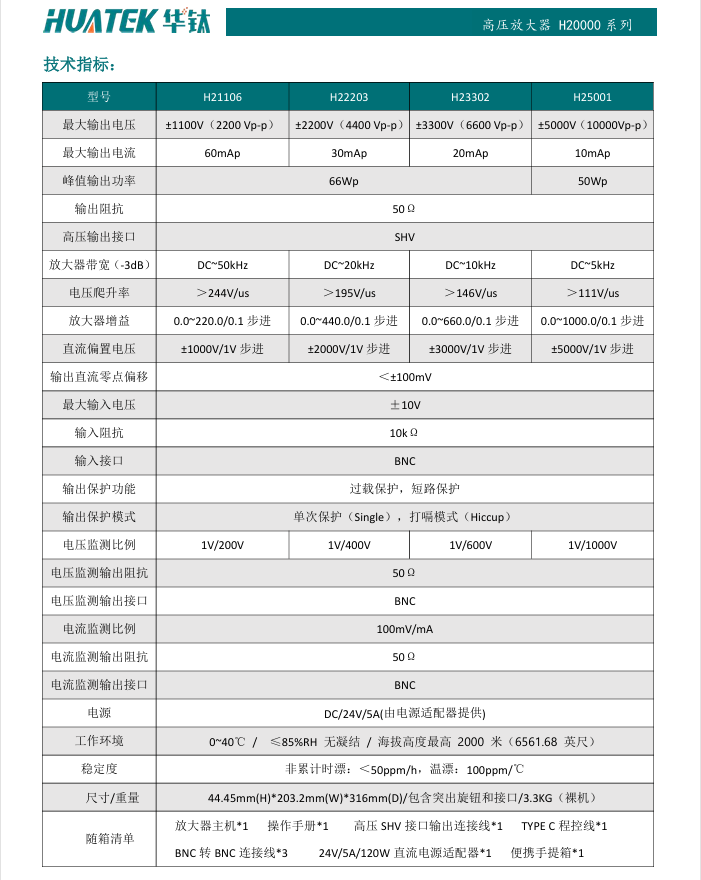
高电压输出能力:需覆盖0-10kV范围,满足不同材料的击穿阈值;
宽频带与高响应速度:支持低频(0.1Hz-100Hz)驱动与高频动态特性分析;
低噪声与高信噪比:确保微弱信号的有效提取36。
二、典型应用场景与技术案例
1. 减振器隔振性能测试
在振动控制领域,介电弹性体减振器的隔振效率与电压载荷密切相关。实验平台中,高压放大器向减振器施加0-3kV直流电压,结合激振器模拟50-100Hz振动环境。通过加速度传感器采集激励端与隔振端的位移信号,分析发现:当电压从0V升至3kV时,隔振传递率在50Hz处降低约40%,验证了电压调控对系统阻尼的优化作用1。HUATEK放大器的高稳定性输出(纹波<0.1%)确保了实验数据的可重复性。
2. 仿生机器人驱动控制
在软体机器人研究中,介电弹性体驱动器的动态响应直接决定运动性能。以仿生跳跃机器人为例,HUATEK高压放大器将3Hz方波信号放大至5.5kV,驱动机器人腿部弹性体周期性收缩。高速相机记录显示,单个电压周期内机器人可完成“抬腿-蓄能-腾空”动作,运动位移达12mm,响应延迟小于10ms8。这一性能得益于放大器的高压摆率设计,有效避免了信号畸变导致的驱动滞后。
3. 生物医疗传感器开发
介电弹性体在生物传感器中的应用依赖于其高灵敏度特性。例如,用于压力检测的电子皮肤需将0.1Pa的微压变化转换为可测电信号。HUATEK放大器通过低噪声前置放大模块(噪声密度<5nV/√Hz),将传感器输出的微伏级信号放大至伏级,信噪比提升超过60dB7。此外,在神经电极阵列测试中,放大器支持多通道同步输出,实现神经元电活动的空间分辨率达50μm。
4. 材料介电特性表征
材料研发阶段,需通过介电谱分析获取弹性体的复介电常数(ε'和ε'')。HUATEK放大器结合阻抗分析仪,可在10Hz-1MHz范围内施加正弦激励电压,同步测量电流相位与幅值。实验表明,添加20%钛酸钡纳米颗粒的硅橡胶弹性体,其ε'从3.2提升至15.6,介电损耗tanδ维持在0.02以下,验证了填料改性的有效性6。

三、技术挑战与未来发展方向
尽管高压放大器已显著推动介电弹性体应用,但仍面临以下瓶颈:
高频驱动限制:现有设备带宽多低于10kHz,难以满足MHz级超快响应材料的测试需求;
多物理场耦合测试:形变、温度、湿度等多参数同步监测需更高集成度的测试系统;
微型化与低功耗设计:植入式医疗设备要求放大器体积小于10cm³且功耗低于1W7。
未来,通过引入GaN(氮化镓)等宽禁带半导体技术,高压放大器的开关频率与能效有望提升3-5倍。此外,结合AI算法实现自适应增益调节与故障预测,将进一步提升测试系统的智能化水平。

结论
HUATEK高压放大器凭借其高电压输出、低噪声放大与精准控制能力,已成为介电弹性体测试的核心工具。从减振隔振到仿生驱动,从医疗传感到材料研发,其技术优势正加速柔性电子与智能材料领域的创新突破。随着新型半导体技术与跨学科方法的融合,高压放大器将在介电弹性体应用中扮演更关键的角色,推动下一代柔性智能系统的实用化进程。
如您对我们的产品感兴趣,欢迎致电北京华钛技术有公司官方联系电话:010-53351705/18301065540(微信)







 京公网安备11011202101548号
京公网安备11011202101548号